引言
在上一节直播课中,张朝阳用微分几何的语言计算了斯托克斯力,并得到了斯托克斯力的形式。但是,整个过程中仍然存在一个疑问,即从微分几何的角度理解应力张量。本次直播课将彻底解决这个疑惑。
微分几何基础
-
单位基矢和坐标基矢
在球坐标系下,单位基矢表示为 $$ \mathbf{\hat{e}_r} = \sin \theta \cos \phi \mathbf{\hat{x}} + \sin \theta \sin \phi \mathbf{\hat{y}} + \cos \theta \mathbf{\hat{z}} $$ $$ \mathbf{\hat{e}_\theta} = \cos \theta \cos \phi \mathbf{\hat{x}} + \cos \theta \sin \phi \mathbf{\hat{y}} - \sin \theta \mathbf{\hat{z}} $$ $$ \mathbf{\hat{e}_\phi} = - \sin \phi \mathbf{\hat{x}} + \cos \phi \mathbf{\hat{y}} $$
对这些单位基矢求偏导的结果可以用空间几何的方式求出,其结果为 $$ \nabla \mathbf{\hat{e}_r} = \mathbf{\hat{e}_\theta} \otimes \mathbf{\hat{e}_\theta} + \mathbf{\hat{e}_\phi} \otimes \mathbf{\hat{e}_\phi} $$ $$ \nabla \mathbf{\hat{e}_\theta} = - \mathbf{\hat{e}_r} \otimes \mathbf{\hat{e}_\theta} + \cot \theta \mathbf{\hat{e}_\theta} \otimes \mathbf{\hat{e}_\phi} $$ $$ \nabla \mathbf{\hat{e}_\phi} = - \mathbf{\hat{e}_r} \otimes \mathbf{\hat{e}_\phi} - \cot \theta \mathbf{\hat{e}_\theta} \otimes \mathbf{\hat{e}_\phi} $$
坐标基矢表示为 $$ \mathbf{e}_r = \partial_r $$ $$ \mathbf{e}_\theta = \frac{1}{r} \partial_\theta $$ $$ \mathbf{e}_\phi = \frac{1}{r \sin \theta} \partial_\phi $$
这三个坐标基矢在球坐标系下不是正交归一的,具体为 $$ \mathbf{e}_r \cdot \mathbf{e}_r = 1, \quad \mathbf{e}_r \cdot \mathbf{e}_\theta = 0, \quad \mathbf{e}_r \cdot \mathbf{e}_\phi = 0 $$ $$ \mathbf{e}_\theta \cdot \mathbf{e}_\theta = r^2, \quad \mathbf{e}_\theta \cdot \mathbf{e}_\phi = 0 $$ $$ \mathbf{e}_\phi \cdot \mathbf{e}_\phi = r^2 \sin^2 \theta $$
这也反应了三维欧氏空间在球坐标系下的度规为 $$ g = \begin{bmatrix} 1 & 0 & 0 \\ 0 & r^2 & 0 \\ 0 & 0 & r^2 \sin^2 \theta \end{bmatrix} $$
-
速度矢量
一个速度矢量可以表达为 $$ \mathbf{v} = v^i \mathbf{e}_i $$
其中,$v^i$是向量的逆变指数,也是这个向量的分量;基矢$\mathbf{e}_i$是坐标基矢,我们称为下基矢。对偶空间的坐标基矢为上基矢,表示为 $$ \mathbf{e}^i = \partial_i $$
上基矢和下基矢的点乘为 $$ \mathbf{e}^i \cdot \mathbf{e}_j = \delta^i_j $$
按照这个说法,原来的速度矢量可以写为 $$ \mathbf{v} = v_i \mathbf{e}^i, $$
即速度矢量的逆变表示可以理解为矢量在上基矢的投影(点乘),而速度矢量的协变表示可以类似地理解为矢量在下基矢的投影(点乘)。
应力张量中梯度项的数学说明
斯托克斯定律是固体小球在流体中运动所受到的粘滞力。在整个过程中,雷诺数需要小于 1。在之前的课程中,我们已经求出其大小,关键是需要引入一个应力张量 $\boldsymbol{\sigma}$,而斯托克斯力大小是应力张量跟法向矢量的点乘在 z 轴上投影的面积分。
凑巧的是,从固体球看是一个球坐标系,导致这里的法矢为径向矢量,即单位矢量$\mathbf{\hat{e}_r}$或者坐标基矢$\mathbf{e}_r$都可以。这里的应力张量的具体形式为 $$ \boldsymbol{\sigma} = \mu( \nabla \mathbf{v} + (\nabla \mathbf{v})^T - \frac{2}{3} \text{tr}(\nabla \mathbf{v}) \mathbf{I} ) $$
其中,$\mu$是流体的粘度;$\nabla$是协变导数;$T$表示转置;$\text{tr}$表示张量的迹;$\mathbf{I}$是单位张量。
在上节直播课程中,我们不加解释地说$\nabla \mathbf{v}$是一个二阶张量,前面的导数算符理解为微分几何中的协变导数。在这里,我们补充说明一下。
- 这里的二阶张量写出分量,两个都是逆变指标,而前面的导数算符理解为协变导数。
- 为了指标平衡,实际需要将这个协变导数再用度规升上去,这样才能跟应力张量的形式一致。
接着,我们再说明一下梯度在微分几何下理解后的表示形式。在矢量微积分中,一个梯度在球坐标下表示为 $$ \nabla \Psi = \frac{\partial \Psi}{\partial r} \mathbf{e}_r + \frac{1}{r} \frac{\partial \Psi}{\partial \theta} \mathbf{e}_\theta + \frac{1}{r \sin \theta} \frac{\partial \Psi}{\partial \phi} \mathbf{e}_\phi $$
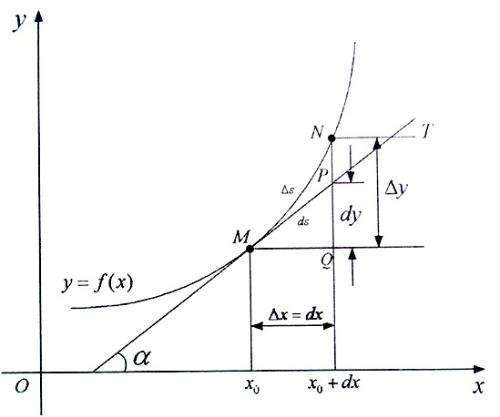
我们从几何上去理解梯度,可以认为是任意一个对象 $\Psi$沿着一个方向的变化。其中,底下的$d\mathbf{l}$就代表沿着$l$方向变化的一小段距离。这个沿着$l$方向有一个微小的变化可表示为一个矢量 $$ d\mathbf{\Psi} = \frac{\partial \Psi}{\partial l} d\mathbf{l} $$
在$\alpha$方向的大小为 $$ d\Psi^\alpha = \frac{\partial \Psi}{\partial l} d\mathbf{l} \cdot \mathbf{e}^\alpha $$
可重新表述这个矢量为 $$ d\mathbf{\Psi} = d\Psi^\alpha \mathbf{e}_\alpha $$
所以,$d\mathbf{l}$为 $$ d\mathbf{l} = \frac{d\mathbf{\Psi}}{\partial \Psi} $$
重新代回得到 $$ \frac{\partial \Psi}{\partial l} = \frac{d\Psi}{d\mathbf{l}} \frac{d\mathbf{l}}{d\Psi} $$
后面的$\Delta\Psi$应该理解为微小的变化$d\Psi$,底








发表评论